Using breadth-first search in Shisen-Sho
Shisen-Sho (also known as Four-Rivers or simply Rivers) is a mahjong-like game, where the player needs to match similar tiles in pairs until all tiles are removed from the board.
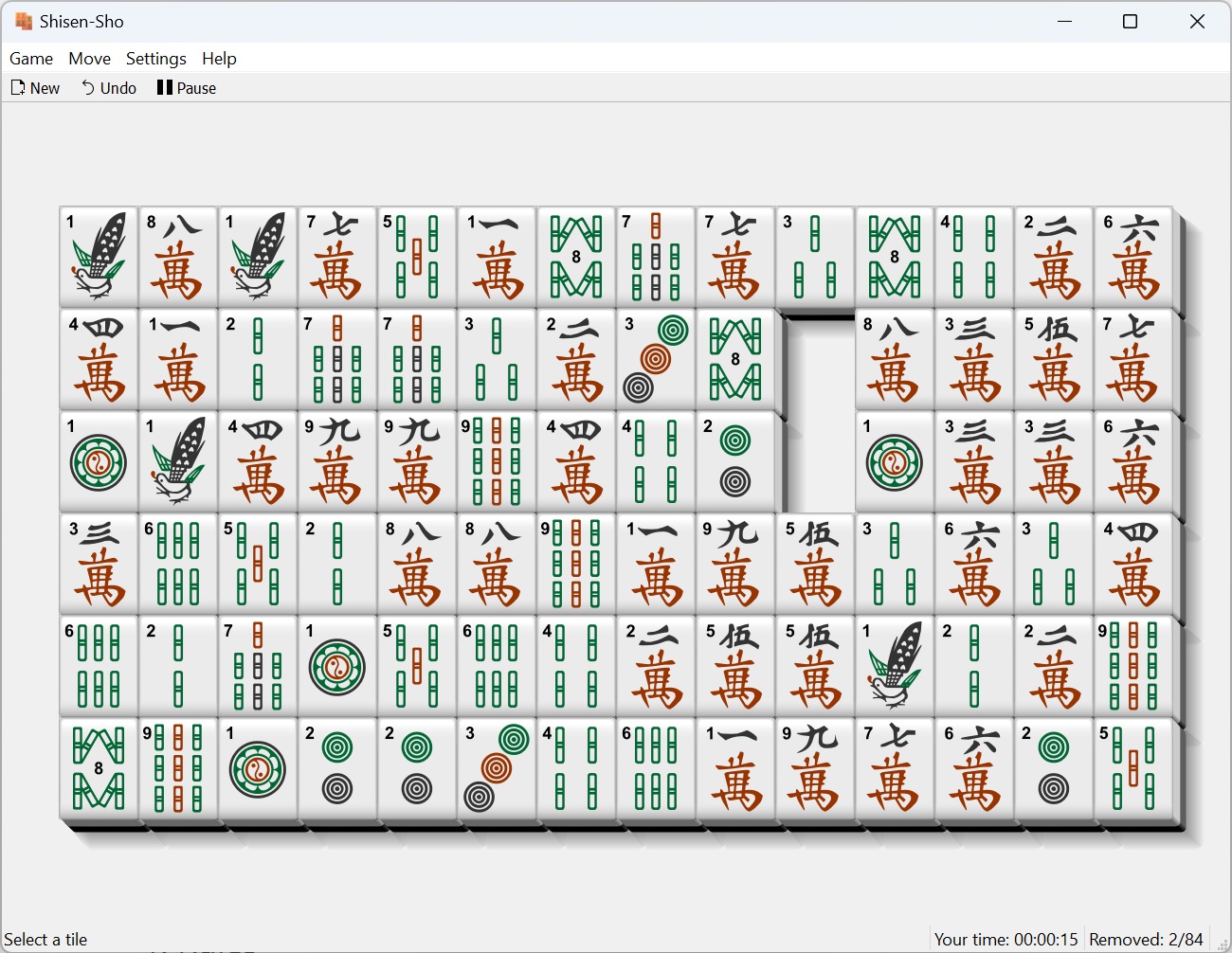
In this article I will cover usage of breadth-first search in implementation of Shisen-Sho game.
1. Rules
The main difference with classic mahjong solitaire games is that to remove two tiles, they must have a connection, and the connection path must not exceeed two 90° turns (in other words: the connection can have at most 3 segments). The connection path must be free of tiles and can’t have diagonal segments.
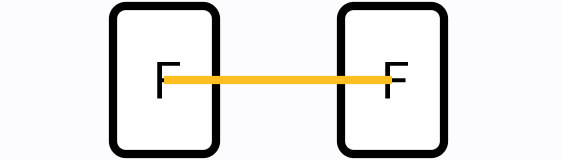
There are 3 different types of connections:
-
One segment
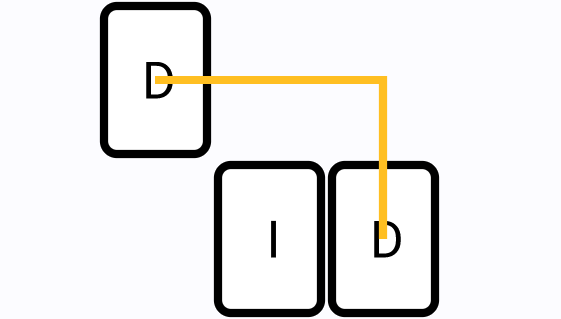
-
Two segments
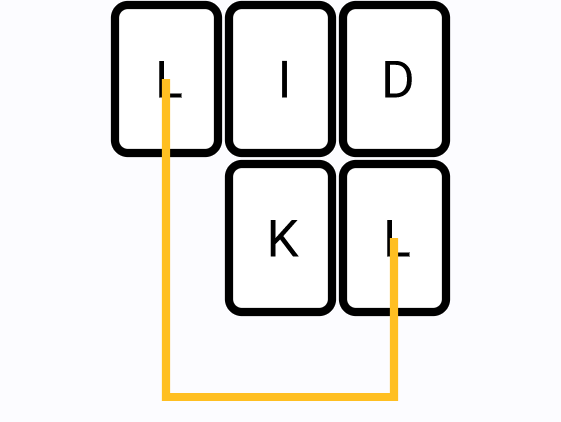
-
Three segments
2. Finding a path
There are several ways to find a path between the tiles.
Here’s description of algorithm which FreeShisen app uses:
ALGORITHM TO COMPUTE CONNECTION PATH BETWEEN PIECES A (IA,JA) AND B (IB,JB)
- Delete A and B from the board (consider them as blank spaces)
- Calculate the set H of possible horizontal lines in the board (lines through blank spaces)
- Calculate the set V of possible vertical lines in the board
- Find HA, VA, HB, VB in the sets
- If HA=HB, result is a straight horizontal line A-B
- If VA=VB, result is a straight vertical line A-B
- If HA cuts VB, the result is an L line A-(IA,JB)-B
- If VA cuts HB, the result is an L line A-(IB,JA)-B
- If exists an V line that cuts HA and HB, the result is a Z line A-(IA,JV)-(IB-JV)-B
- If exists an H line that cuts VA and VB, the result is a Z line A-(IV,JA)-(IV,JB)-B
Basically, this is a brute-force search, which is pretty ineffective. It also does not yield the shortest paths.
Another approach is implemented in kshisen:
- Find a simple path:
- if tiles are located in the same row or column, the path might be a straight line
-
Find two segments path:
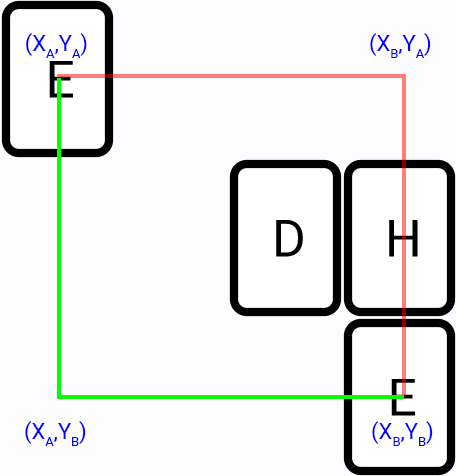
There are two options for a possible path (red and green lines).
-
Find three segments path:
From first tile position go in all directions (left, top, right, bottom) and try to find a two segments path to second tile, for example:
It is the more efficient method, compared to the brute-force, since we perform search only in part of the game field. And most of the time this algorithm will provide the shortest paths.
A note on shortest paths
In some cases the algorithm will produce suboptimal paths.
In a situation where two or more possible paths exist, the solution will depend on in which direction you go first in the 3rd step.
In breadth-first search version we will use a similar technique.
3. Breadth-first search
On each iteration of algorithm expand search in all directions (left, top, right, bottom), keeping track of number of remaining turns.
The outline of an algorithm to find a path from tile A to tile B:
- Create a
queuefor storing nodes - Expand the start node
A, add them toqueue - If
queue:- is empty - no path from
AtoB, exit - is not empty - fetch next node
Nfromqueue
- is empty - no path from
- Check
N:- if
NisB, the path is found, exit - if
Nis notB, go to step 3
- if
- If
Nis empty cell, expand search from this node - Repeat steps 3-6
It is important to understand how we expand nodes. For each node we offset it’s x and y positions in all possible directions and thus make new nodes:
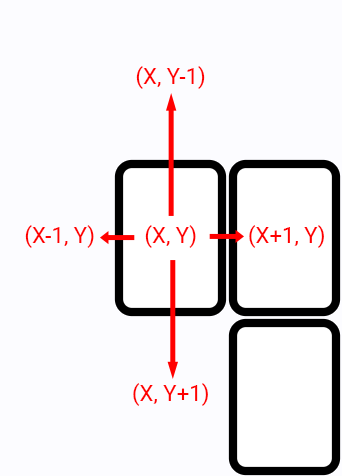
If we expand a node in the same direction as parent node - we don’t change number of remaining turns.
If old and new directions differ, decrease number of turns. If number of remaining turns becomes negative - stop expanding in that direction.
4. Implementation
N.B. I will use Kotlin to implement the algorithm
4.1. Prepare the field
First, create an array of arrays for storing game field, where null is for an empty cell and Char is for a tile:
val width = 6
val height = 4
// create field and initialize it with nulls
val gameField: Array<Array<Char?>> = Array(width + 2) { Array(height + 2) { null } }
Accessing tile at (x, y) is easy:
val tile: Char? = gameField[x][y]
The width and height are size of the puzzle, and the extra 2’s are needed for building paths for tiles
at the edges of the field.
Now, let’s throw some numbers tiles on the field:
val alphabet: MutableList<Char> = ('A'..'Z').toMutableList()
val tiles = ArrayList<Char>(width * height)
val tileCount = 4 // two pairs for each tile
for (i in 0 until (width * height / tileCount)) {
val tile = alphabet.removeFirst()
repeat(tileCount) {
tiles.add(tile)
}
}
// shuffle tiles
tiles.shuffle()
// fill the field
for (x in 1..width) {
for (y in 1..height) {
gameField[x][y] = tiles.removeLast()
}
}
After these manipulations, our gameField will look like this (. is empty cell):
. . . . . . . .
. B D E F D D .
. B C C B A A .
. A C F F A D .
. E F E E C B .
. . . . . . . .
4.2. Prepare the tools
Create SearchNode class, which will hold information about nodes:
class SearchNode(
val x: Int, // x position of the node in the field
val y: Int, // y position of the node in the field
val turnsLeft: Int, // number of turns left
val direction: Direction?, // direction of expansion, will be `null` for initial node
val parent: SearchNode? // parent of this node, for tracking down the path
)
To simplify working with directions, create a separate Direction class with corresponding dx and dy offsets:
enum class Direction(
val dx: Int,
val dy: Int
) {
UP(dx = 0, dy = -1),
DOWN(dx = 0, dy = 1),
LEFT(dx = -1, dy = 0),
RIGHT(dx = 1, dy = 0)
}
Point class will be used to build the resulting path:
class Point(
val x: Int,
val y: Int
)
We will need two methods for finding a the path and expanding nodes:
fun findPath(
ax: Int, ay: Int, // coordinates of the first tile
bx: Int, by: Int // coordinates of the second tile
): List<Point> {
TODO("Not implemented")
}
fun expand(node: SearchNode): List<SearchNode> {
TODO("Not implemented")
}
4.3. Implement the algorithm
Everything is ready for implementing the search algorithm.
For findPath we need to do the following:
- Check if
(ax, ay)and(bx, by)are not the same cell - Check if there’re tiles at
(ax, ay)and(bx, by)and their labels match - Create
queueand add initial node to it (tile at(ax, ay)) - While
queueis not empty:- remove first
nodefrom thequeue - check if
nodeis the target node - if it is, path found - if
nodeis empty, expand it
- remove first
The code:
fun findPath(
ax: Int, ay: Int, // coordinates of the first tile
bx: Int, by: Int // coordinates of the second tile
): List<Point> {
if (ax == bx && ay == by) {
// the same cell
return emptyList()
}
val a = gameField[ax][ay]
val b = gameField[bx][by]
if (a == null || b == null || a != b) {
// either one of cells is empty or tile labels does not match, no path
return emptyList()
}
val queue = ArrayDeque<SearchNode>()
// expand initial node
val children = expand(
SearchNode(x = ax, y = ay, turnsLeft = 2, direction = null, parent = null)
)
queue.addAll(children)
while (queue.isNotEmpty()) {
val node = queue.removeFirst()
if (gameField[node.x][node.y] != null) {
// don't need to check tile label, only coordinates
if (node.x == bx && node.y == by) {
// path found, trace back to build the list
val path = ArrayList<Point>()
var p: SearchNode? = node
while (p != null) {
path.add(Point(p.x, p.y))
p = p.parent
}
return path
} else {
// tile itself cannot be expanded
// continue to the next iteration
continue
}
}
// expand node
queue.addAll(expand(node))
}
// there's no path between a and b
return emptyList()
}
In expand method, for every Direction:
- Calculate
turnsLeft- if it’s less than
0, continue to next iteration
- if it’s less than
- Calculate
newXandnewY- check if they’re within the bounds of the field (including extra padding)
- If all checks passed, add new node to candidates list
In code:
fun expand(node: SearchNode): List<SearchNode> {
val children = ArrayList<SearchNode>()
for (direction in Direction.values()) {
val turnsLeft = if (node.direction == null || node.direction == direction) {
// if the direction is the same (or null, if it's the initial node)
// keep turnsLeft the same
node.turnsLeft
} else {
// we made a turn
node.turnsLeft - 1
}
if (turnsLeft < 0) {
// no turns left, try to expand in another direction
continue
}
val newX = node.x + direction.dx
val newY = node.y + direction.dy
if (newX !in 0..(width + 1) || newY !in 0..(height + 1)) {
// make sure we're not getting out of bounds
continue
}
// add node to list
children.add(SearchNode(newX, newY, turnsLeft, direction, node))
}
return children
}
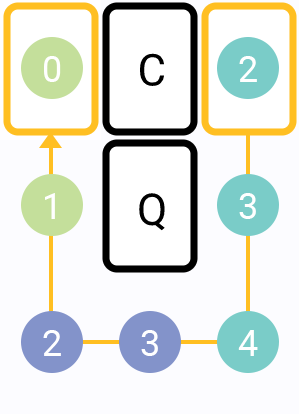
Here is visualization of the algorithm (numbers - turns left, colors - iterations):
5. Optimizations
As you can see, the algorithm also expands in directions which are guaranteed to fail. We can use some tricks to prune unpromising nodes from the search set.
If tiles are next to each other, no need to run BFS
Manhattan distance is to the rescue:
So, we just check if distance is 1:
fun manhattan(x1: Int, y1: Int, x2: Int, y2: Int): Int {
return abs(x2 - x1) + abs(y2 - y1)
}
fun findPath(...): List<Point> {
// ...
if (manhattan(ax, ay, bx, by) == 1) {
return listOf(Point(ax, ay), Point(bx, by))
}
// run bfs
}
This simple check will eliminate startup cost of BFS.
Tiles should have at least one empty cell nearby - otherwise we can’t connect the tiles (unless they are next to each other)
It’s easy to see if one of the tiles is blocked, the path cannot be found:
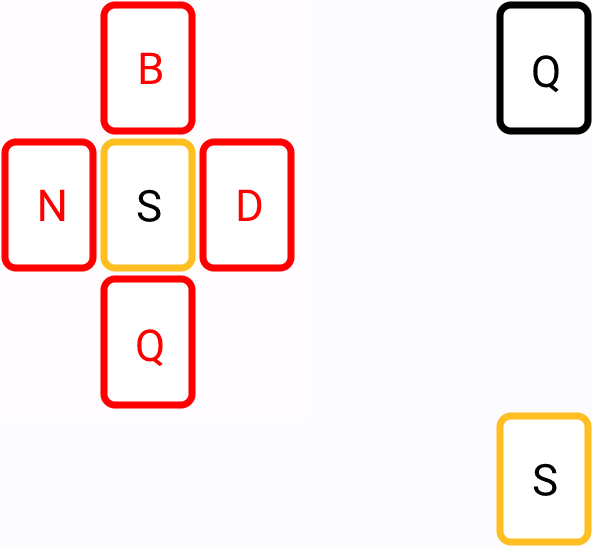
So, let’s add another check to findPath:
fun hasEmptyCells(x: Int, y: Int): Boolean {
return x - 1 >= 0 && gameField[x - 1][y] == null ||
x + 1 <= (width + 1) && gameField[x + 1][y] == null ||
y - 1 >= 0 && gameField[x][y - 1] == null ||
y + 1 <= (height + 1) && gameField[x][y + 1] == null
}
fun findPath(...): List<Point> {
// check manhattan distance
if (!hasEmptyCells(ax, ay) || !hasEmptyCells(bx, by)) {
return emptyList()
}
// run bfs
}
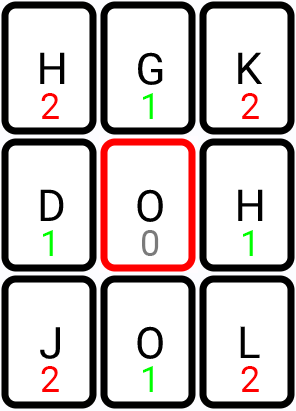
For the last two segments the distance to the second tile must decrease with each step - if it is not, we can stop search in corresponding direction
Here’s another place where manhattan distance comes in handy. Let’s we look closely what happens when we have paths with different number of segments:
- For a path with one segment, either x or y coordinate is the same - distance always decreases
- For a path with two segments, x and y coordinates differ, so one segment will close the gap by x axis, and the other will close gap by y axis - distance always decreases
- For a path with three segments, on the first segment the distance can increase, but then it will decrease (the same as for two segments case)
For example, 3 segments path:
As you can see, the distance raises at the beginning (from 2 to 4), then descreases as we approach target cell on
the x and y axes.
So, to improve our algorithm, we add a simple check:
fun expand(node: SearchNode, bx: Int, by: Int): List<SearchNode> {
// ...
for (direction in Direction.values()) {
// ...
if (turnsLeft < 2) {
// for the last two segments the distance
// must decrease on each step in path
val distance = manhattan(node.x, node.y, bx, by)
val newDistance = manhattan(newX, newY, bx, by)
if (distance < newDistance) {
// try another direction
continue
}
}
// add node to list
// ...
}
return children
}
6. Final words
Although BFS is not the optimal solution in terms of memory, it always finds the shortest paths and thus works well for shisen-sho.
The code can be found in my repository italankin/shisensho-base:
And if you haven’t played the game itself, you should definetely try it out. For example, download my Shisen-Sho for Android.
Also, kshisen is a good (and free) one to start, but I personally like Kyodai Mahjongg more.